6. Observer Kalman Filter Identification Algorithm (OKID)
Most techniques to identify the Markov parameters sequence are based on the Fast Fourier Transform (FFT) of the inputs and measured outputs to compute the Frequency Response Functions (FRFs), and then use the Inverse Discrete Fourier Transform (IDFT) to compute the sampled pulse response histories. The discrete nature of the FFT causes one to obtain pulse response rather than impulse response, and a somewhat rich input is required to prevent numerical ill-conditioning. Indeed, the FRF is a ratio between the output and input DFT transform coefficients which requires the input signal to be rich in frequencies so that the corresponding quantity is invertible. However, considerable information can be deduced simply by observing frequency response functions, justifying why FRFs are still generated so often. Another approach is to solve directly in the time domain for the system Markov parameters from the input and output data. A method has been developed to compute the Markov parameters of a linear system in the time-domain. A drawback of this direct time-domain method is the need to invert an input matrix which necessarily becomes particularly large for lightly damped systems. Rather than identifying the system Markov parameters which may exhibit very slow decay, one can use an asymptotically stable observer to form a stable discrete state-space model for the system to be identified. The method is referred as the Observer/Kalman filter Identification algorithm (OKID) and is a procedure where the state-space model and a corresponding observer are determined simultaneously.
6.1) Classical Formulation
Considering a sequence of \(l\) elements, assuming zero initial condition \(\boldsymbol{x}(0) = \boldsymbol{0}\):
\begin{align} \label{Eq: Sequence y(l-1)} \boldsymbol{y}(l-1) &= \sum_{i=1}^{l-1}CA^{i-1}B\boldsymbol{u}(l-1-i)+D\boldsymbol{u}(l-1). \end{align}
In a matrix form, \eqref{Eq: Sequence y(l-1)} is written as
\begin{align} \label{Eq: Observer1} \boldsymbol{y} = \boldsymbol{Y}\boldsymbol{U} \end{align}
with
\begin{align} \boldsymbol{y} &= \begin{bmatrix} \boldsymbol{y}(0) & \boldsymbol{y}(1) & \boldsymbol{y}(2) & \cdots & \boldsymbol{y}(l-1) \end{bmatrix},\\ \boldsymbol{Y} &= \begin{bmatrix} D & CB & CAB & \cdots & CA^{l-2}B \end{bmatrix},\\ \boldsymbol{U} &= \begin{bmatrix} \boldsymbol{u}(0) & \boldsymbol{u}(1) & \boldsymbol{u}(2) & \cdots & \boldsymbol{u}(l-1)\\ &\boldsymbol{u}(0) & \boldsymbol{u}(1) & \cdots & \boldsymbol{u}(l-2)\\ & & \boldsymbol{u}(0) & \cdots & \boldsymbol{u}(l-3)\\ & & & \ddots & \vdots \\ & & & & \boldsymbol{u}(0) \end{bmatrix}. \end{align}
The matrix \(\boldsymbol{y}\) is an \(m\times l\) output data matrix and the matrix \(\boldsymbol{Y}\), of dimension \(m\times rl\), contains all the Markov parameters to be determined. As summarized in the Table below, \eqref{Eq: Observer1} is insolvable in the multi-input multi-output case in general: the solution \(\boldsymbol{Y}\) is not unique whereas it should be (Markov parameters must be unique for a finite-dimensional linear system). The matrix \(\boldsymbol{Y}\) can only be uniquely determined from this set of equations for \(r=1\). However, even in this case, if the input signal has zero initial value or is not rich enough in frequency content or if anything makes the matrix \(\boldsymbol{U}\) ill-conditioned, the matrix \(\boldsymbol{Y} = \boldsymbol{y}\boldsymbol{U}^{-1}\) cannot be accurately computed.
\begin{array}{|c|c|} \hline \# \text{Equations} & \# \text{Unknowns}\\ \hline \hline m\times l & m\times rl \\ \hline \end{array}
However, if \(A\) is asymptotically stable so that for some \(l_0\), \(A^k \simeq 0\) for all time steps \(k\geq l_0\), \eqref{Eq: Observer1} can be approximated by
\begin{align} \label{Eq: Observer2} \boldsymbol{y} \simeq \widetilde{\boldsymbol{Y}}\widetilde{\boldsymbol{U}}, \end{align}
with
\begin{align} \boldsymbol{y} &= \begin{bmatrix} \boldsymbol{y}(0) & \boldsymbol{y}(1) & \boldsymbol{y}(2) & \cdots & \boldsymbol{y}(l-1) \end{bmatrix},\\ \widetilde{\boldsymbol{Y}} &= \begin{bmatrix} D & CB & CAB & \cdots & CA^{l_0-1}B \end{bmatrix},\\ \widetilde{\boldsymbol{U}} &= \begin{bmatrix} \boldsymbol{u}(0) & \boldsymbol{u}(1) & \boldsymbol{u}(2) & \cdots & \boldsymbol{u}(l_0) & \cdots & \boldsymbol{u}(l-1)\\ &\boldsymbol{u}(0) & \boldsymbol{u}(1) & \cdots & \boldsymbol{u}(l_0-1) & \cdots & \boldsymbol{u}(l-2)\\ & & \boldsymbol{u}(0) & \cdots & \boldsymbol{u}(l_0-2) & \cdots & \boldsymbol{u}(l-3)\\ & & & \ddots & \vdots & \cdots & \vdots \\ & & & & \boldsymbol{u}(0) & \cdots & \boldsymbol{u}(l-l_0-1) \end{bmatrix}. \end{align}
Choose the data record length \(l\) greater than \(r(l_0+1)\) and \eqref{Eq: Observer2} indicates that there are more equations than constraints, as summarized in the table below. It follows that the first \(l_0+1\) Markov parameters approximately satisfy
\begin{align} \widetilde{\boldsymbol{Y}} = \boldsymbol{y}\widetilde{\boldsymbol{U}}^\dagger, \end{align}
and the approximation error decreases as \(l_0\) increases.
\begin{array}{|c|c|} \hline \# \text{Equations} & \# \text{Unknowns}\\ \hline m\times l & m\times r(l_0+1) \\ \hline \end{array}
Unfortunately, for lightly damped structures, the integer \(l_0\) and thus the the data length \(l\) required to make the approximation in \eqref{Eq: Observer2} valid becomes impractically large in the sense that the size of the matrix \(\widetilde{\boldsymbol{U}}\) is too large to solve for its pseudo-inverse numerically. A solution to artificially increase the damping of the system in order to allow a decent numerical solution is to add a feedback loop to make the system as stable as desired.
6.2) State-Space Observer Model
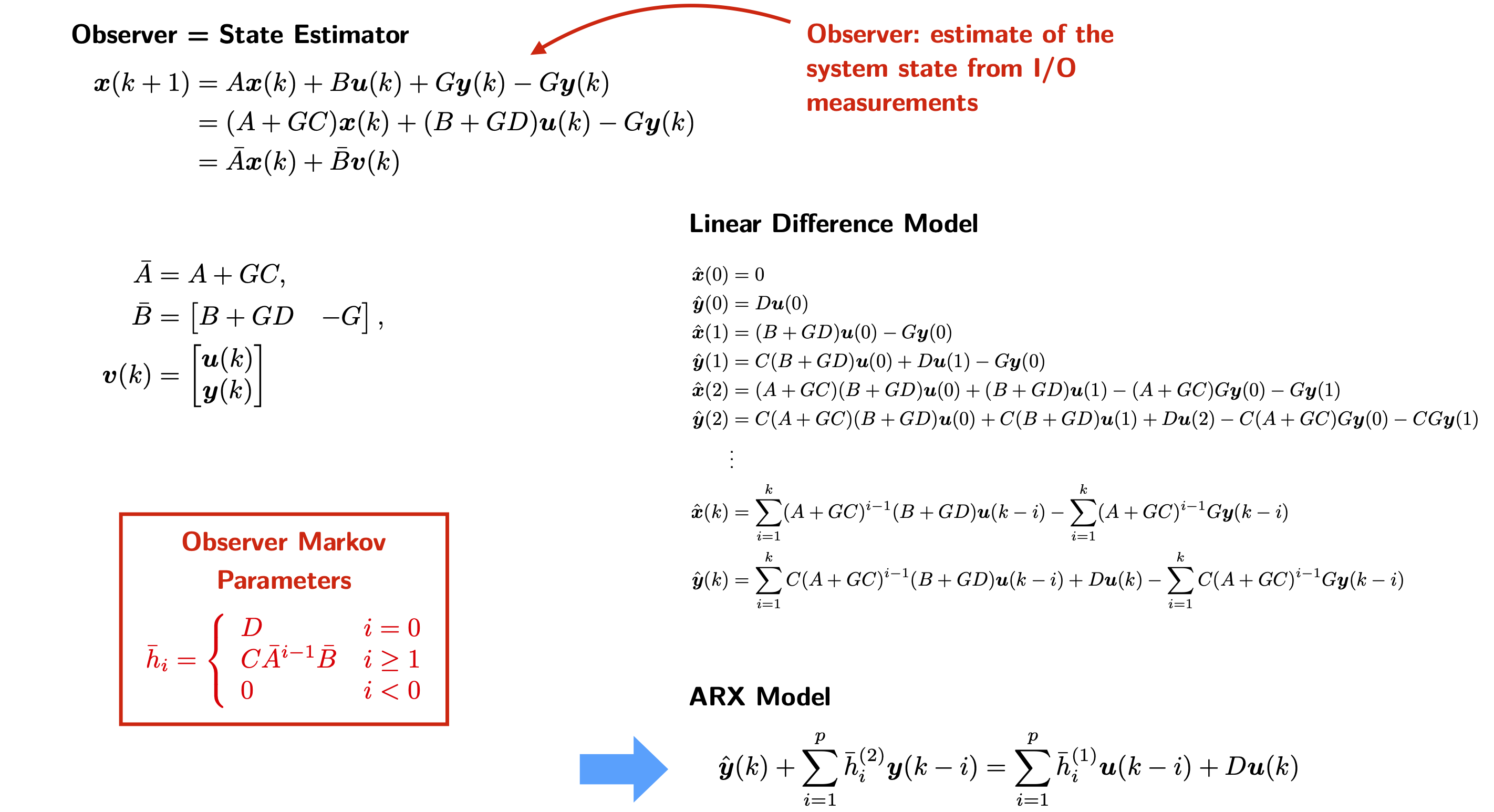
In practice, the primary purpose of introducing an observer is an artifice to compress the data and improve system identification results. A state estimator, also known as an observer, can be used to provide an estimate of the system state from input and output measurements. Add and subtract the term \(G\boldsymbol{y}(k)\) to the right-hand side of the state equation to yield
\begin{align} \boldsymbol{x}(k+1) &= A\boldsymbol{x}(k)+B\boldsymbol{u}(k) + G\boldsymbol{y}(k) - G\boldsymbol{y}(k)\\ &= (A+GC)\boldsymbol{x}(k)+(B+GD)\boldsymbol{u}(k)- G\boldsymbol{y}(k)\\ &= \bar{A}\boldsymbol{x}(k)+\bar{B}\boldsymbol{v}(k) \end{align}
where
\begin{align} \bar{A} &= A+GC,\\ \bar{B} &= \begin{bmatrix} B+GD & -G \end{bmatrix},\\ \boldsymbol{v}(k) &= \begin{bmatrix} \boldsymbol{u}(k)\\ \boldsymbol{y}(k) \end{bmatrix}, \end{align}
and \(G\) is an arbitrary matrix chosen to make the matrix \(\bar{A}\) as stable as desired. The Markov parameters of this observer system are referred as
\begin{align} \label{Eq: Observer3} \bar{\boldsymbol{y}} = \bar{\boldsymbol{Y}}\boldsymbol{V} \end{align}
with
\begin{align} \bar{\boldsymbol{y}} &= \begin{bmatrix} \boldsymbol{y}(0) & \boldsymbol{y}(1) & \boldsymbol{y}(2) & \cdots & \boldsymbol{y}(l-1) \end{bmatrix},\\ \bar{\boldsymbol{Y}} &= \begin{bmatrix} D & C\bar{B} & C\bar{A}\bar{B} & \cdots & C\bar{A}^{l-2}\bar{B} \end{bmatrix},\\ \boldsymbol{V} &= \begin{bmatrix} \boldsymbol{u}(0) & \boldsymbol{u}(1) & \boldsymbol{u}(2) & \cdots & \boldsymbol{u}(l-1)\\ &\boldsymbol{v}(0) & \boldsymbol{v}(1) & \cdots & \boldsymbol{v}(l-2)\\ & & \boldsymbol{v}(0) & \cdots & \boldsymbol{v}(l-3)\\ & & & \ddots & \vdots \\ & & & & \boldsymbol{v}(0) \end{bmatrix}. \end{align}
\begin{array}{|c|c|} \hline \# \text{Equations} & \# \text{Unknowns}\\ \hline m\times l & m\times ((r+m)(l-1)+r) \\ \hline \end{array}
Similarly as before, when \(C\bar{A}^k\bar{B} \simeq 0\) for all time steps \(k\geq l_0\) for some \(l_0\), Eq. (\ref{Eq: Observer3}) can be approximated by
\begin{align} \label{Eq: Observer4} \bar{\boldsymbol{y}} \simeq \widetilde{\bar{\boldsymbol{Y}}}\widetilde{\boldsymbol{V}}, \end{align}
with
\begin{align} \bar{\boldsymbol{y}} &= \begin{bmatrix} \boldsymbol{y}(0) & \boldsymbol{y}(1) & \boldsymbol{y}(2) & \cdots & \boldsymbol{y}(l-1) \end{bmatrix},\\ \widetilde{\bar{\boldsymbol{Y}}} &= \begin{bmatrix} D & C\bar{B} & C\bar{A}\bar{B} & \cdots & C\bar{A}^{l_0-1}\bar{B} \end{bmatrix},\\ \widetilde{\boldsymbol{V}} &= \begin{bmatrix} \boldsymbol{u}(0) & \boldsymbol{u}(1) & \boldsymbol{u}(2) & \cdots & \boldsymbol{u}(l_0) & \cdots & \boldsymbol{u}(l-1)\\ &\boldsymbol{v}(0) & \boldsymbol{v}(1) & \cdots & \boldsymbol{v}(l_0-1) & \cdots & \boldsymbol{v}(l-2)\\ & & \boldsymbol{v}(0) & \cdots & \boldsymbol{v}(l_0-2) & \cdots & \boldsymbol{v}(l-3)\\ & & & \ddots & \vdots & \cdots & \vdots \\ & & & & \boldsymbol{v}(0) & \cdots & \boldsymbol{v}(l-l_0-1) \end{bmatrix}. \end{align}
\begin{array}{|c|c|} \hline \# \text{Equations} & \# \text{Unknowns}\\ \hline m\times l & m\times ((r+m)l_0+r) \\ \hline \end{array}
The first \(l_0+1\) observer Markov parameters approximately satisfy
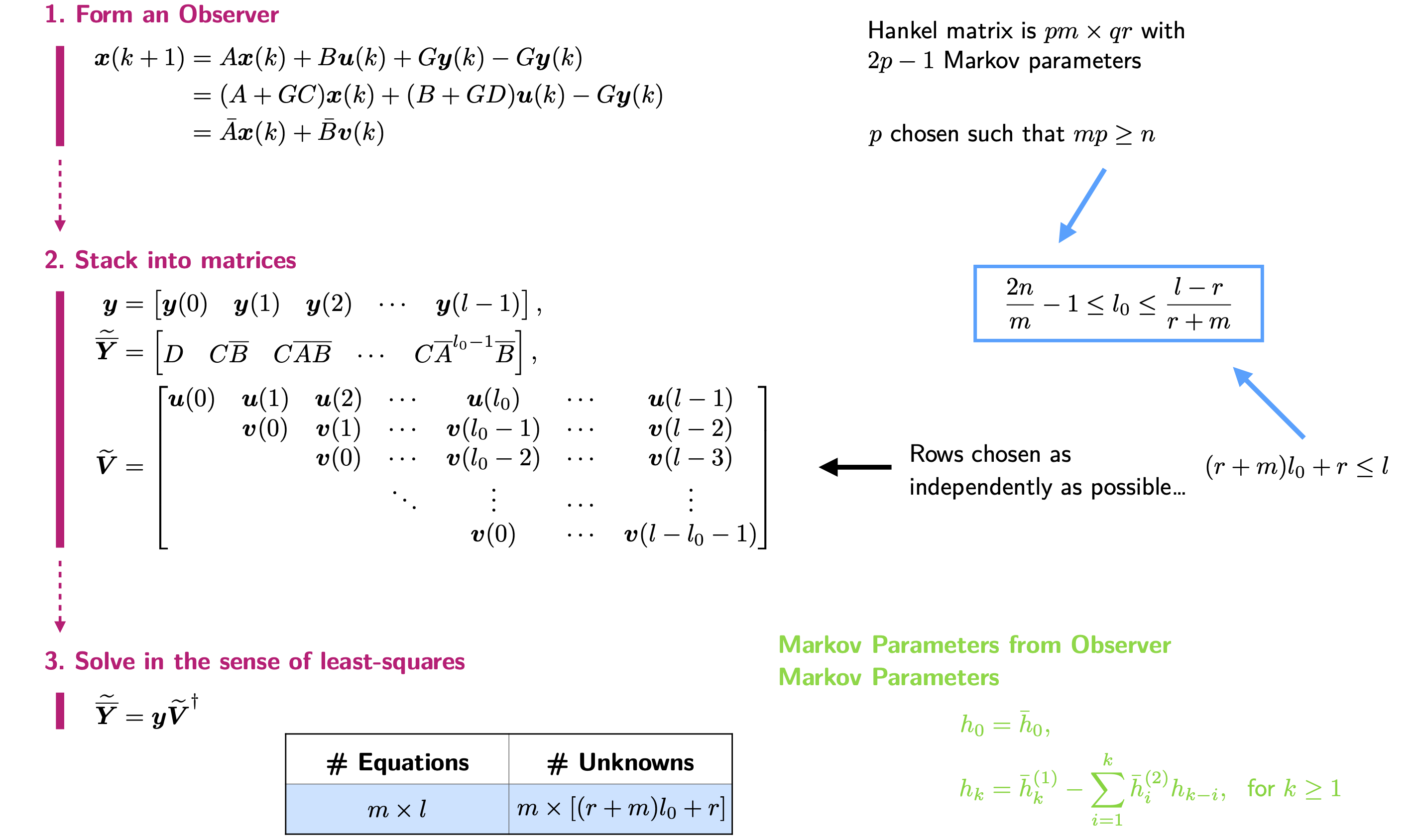
\begin{align} \widetilde{\bar{\boldsymbol{Y}}} = \bar{\boldsymbol{y}}\widetilde{\boldsymbol{V}}^\dagger, \end{align}
and the approximation error decreases as \(l_0\) increases. To solve for \(\widetilde{\bar{\boldsymbol{Y}}}\) uniquely, all the rows of \(\widetilde{\boldsymbol{V}}\) must be linearly independent. Furthermore, to minimize any numerical error due to the computation of the pseudo-inverse, the rows of \(\widetilde{\boldsymbol{V}}\) should be chosen as independently as possible. As a result, the maximum value of \(l_0\) is the number that maximizes the quantity \((r+m)l_0 + r \leq l\) of independent rows of \(\widetilde{\boldsymbol{V}}\). The maximum \(l_0\) means the upper bound of the order of the deadbeat observer. Furthermore, it is known that the rank of a sufficiently large Hankel matrix \(\boldsymbol{H}_0^{(p, q)}\) is the order of the controllable and observable part of the system (the identified state matrix \(\hat{A}\) represents only the controllable and observable part of the system). The size of the Hankel matrix is \(pm\times qr\) comprised of \(p+q-1\) Markov parameters; with \(p=q\), this means \(2p-1\) Markov parameters. If \(l_0\) is the number of Markov parameters calculated through OKID, it means that \(l_0 = 2p-1\). Assuming \(qr > n\), the maximum rank of \(\boldsymbol{H}_0^{(p, q)}\) is thus \(mp\). If \(p\) is chosen such that \(mp \geq n\), then a realized state matrix \(\hat{A}\) with order \(n\) should exist. Therefore, the number of Markov parameters computed, (l_0\), must be chosen such that
\begin{align} mp \geq n \Leftrightarrow m\dfrac{l_0+1}{2} \geq n, \end{align}
where \(m\) is the number of outputs and \(n\) is the order of the system. To conclude, the lower and upper bounds on \(l_0\) are
\begin{align} \dfrac{2n}{m}-1\leq l_0 \leq \dfrac{l-r}{r+m} \end{align}
with \(l\) being the length of the input signal considered.
The observer Markov parameters can then be used to compute the Markov parameters and the matrices \(A\), \(B\), \(C\) and \(D\).
6.3) Computation of Markov Parameters from Observer Markov Parameters
To recover the system Markov parameters from the observer Markov parameters, write
\begin{align} \bar{h}_0 &= D,\\ \bar{h}_k &= C\bar{A}^{k-1}\bar{B}\\ &= \begin{bmatrix} C(A+GC)^{k-1}(B+GD) & -C(A+GC)^{k-1}G \end{bmatrix}\\ &= \begin{bmatrix} \bar{h}_k^{(1)} & -\bar{h}_k^{(2)} \end{bmatrix} \end{align}
Thus, the Markov parameter \(h_1\) of the system is simply
\begin{align} h_1 = CB = C(B+GD)-(CG)D = \bar{h}_1^{(1)} - \bar{h}_1^{(2)}D = \bar{h}_1^{(1)} - \bar{h}_1^{(2)}h_0. \end{align}
Considering the product
\begin{align} \bar{h}_2^{(1)} = C(A+GC)(B+GD) = CAB+CGCB+C(A+GC)GD = h_2 + \bar{h}_1^{(2)}h_1+\bar{h}_2^{(2)}h_0, \end{align}
the next Markov parameter is
\begin{align} h_2 = CAB = \bar{h}_2^{(1)}-\bar{h}_1^{(2)}h_1-\bar{h}_2^{(2)}h_0. \end{align}
Note that the sum of subscript(s) of each individual term both sides is identical. By induction, the general relationship between the actual system Markov parameters and the observer Markov parameters is
\begin{align} h_0 &= \bar{h}_0,\\ h_k &= \bar{h}_k^{(1)} - \sum_{i=1}^k\bar{h}_i^{(2)}h_{k-i}, \ \ \text{for} \ k \geq 1. \end{align}
6-4) Summary